Robotic Chess Project: AI Vision Model & Code (UR3e) COMPLETED
ID: 28616
$8.00
3D Model Details
-
Texture: No
-
Multipart model: Yes
-
File format: stl
-
File size: 258.26 MB
-
Upload date: 03/10/2026
-
Last update: 03/10/2026
Description
*** IMPORTANT: COMPLETED ***
This is a live project and a prototype version.
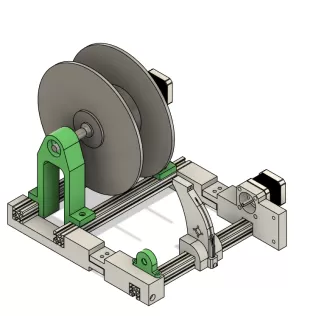
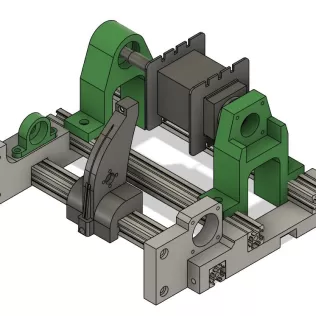
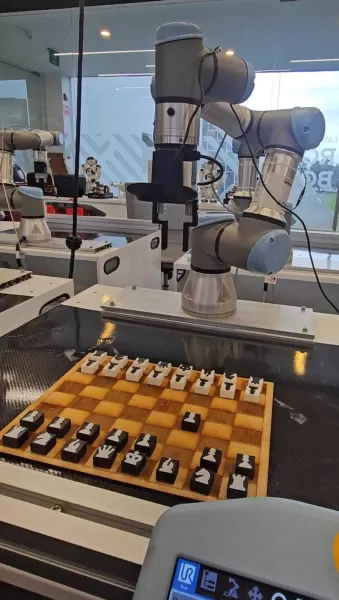
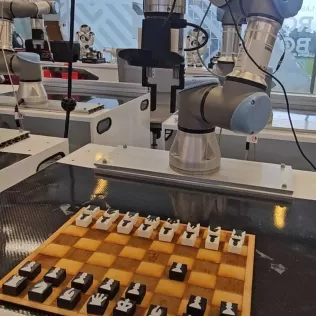
Build your own robotic chess opponent! This is an university project to create a complete system that uses a UR3e robot arm to move pieces on a real-world board.
ALL PYTHON SCRIPTS ARE AVAILABLE: NOW!
The heart of this project is a robust, pre-trained computer vision (CV) model designed to identify all chess pieces. It has been optimized to operate in Black & White (B/W), which dramatically improves detection reliability and speed—a key requirement for real-time robotics.
With the provided Python scripts (when released) and your hardware, you can bring this incredible automated game system to life.
Technology Stack:
Vision (Included): Pre-trained CV model.
Control (Included): Python scripts to integrate vision with the robot.
Required Hardware: UR3e Robot Arm and a 3D Printed (STL) Chess Set.
Camera: A webcam is required (the Logitech C920 is a good option).
Board: FDM (28x32 cm)
Project Roadmap
Follow the progress of this exciting project!
✅ COMPUTER VISION [COMPLETE]
The model correctly identifies pieces and their positions.
✅ PIECE & BOARD DESIGN [COMPLETE]
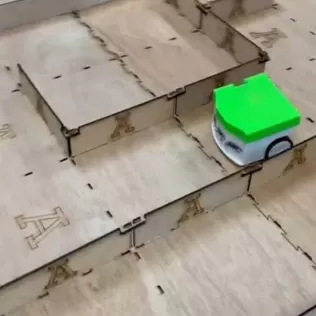
Designing custom 3D printable pieces and a board with a defined robot-safe zone.
✅ ROBOTIC CONTROL [COMPLETE]
Developing kinematics and gripping routines for the UR3e using Python.
✅ CHESS AI [COMPLETE]
Integrating a chess engine (AI) for decision-making.
Impresora FDM
0.28 mm
130 mm/s
240°C
PETG Obligatorio
This is a live project and a prototype version.
Build your own robotic chess opponent! This is an university project to create a complete system that uses a UR3e robot arm to move pieces on a real-world board.
ALL PYTHON SCRIPTS ARE AVAILABLE: NOW!
The heart of this project is a robust, pre-trained computer vision (CV) model designed to identify all chess pieces. It has been optimized to operate in Black & White (B/W), which dramatically improves detection reliability and speed—a key requirement for real-time robotics.
With the provided Python scripts (when released) and your hardware, you can bring this incredible automated game system to life.
Technology Stack:
Vision (Included): Pre-trained CV model.
Control (Included): Python scripts to integrate vision with the robot.
Required Hardware: UR3e Robot Arm and a 3D Printed (STL) Chess Set.
Camera: A webcam is required (the Logitech C920 is a good option).
Board: FDM (28x32 cm)
Project Roadmap
Follow the progress of this exciting project!
✅ COMPUTER VISION [COMPLETE]
The model correctly identifies pieces and their positions.
✅ PIECE & BOARD DESIGN [COMPLETE]
Designing custom 3D printable pieces and a board with a defined robot-safe zone.
✅ ROBOTIC CONTROL [COMPLETE]
Developing kinematics and gripping routines for the UR3e using Python.
✅ CHESS AI [COMPLETE]
Integrating a chess engine (AI) for decision-making.
Impresora FDM
0.28 mm
130 mm/s
240°C
PETG Obligatorio
Tags
- chess
- robot
- 3d-printed
- webcam
- chess set
- robotics
- engineering
- robotic
- maker
- python
- ai, computer vision
- cv, project
- ur3e
- universal robots
- chess bot
- autonomous
- in-progress
- logitech c920
Report this design