












Mechanical gripper
ID: 28059
$5.00
3D Model Details
-
Texture: No
-
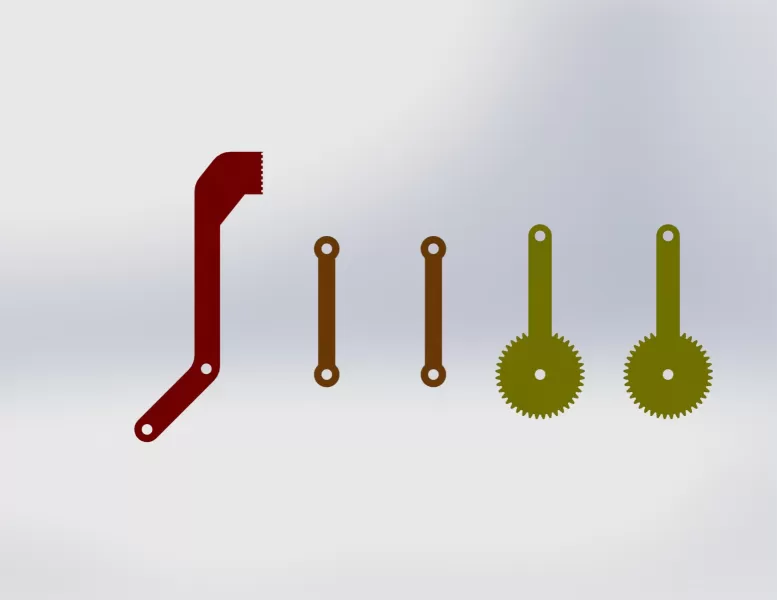
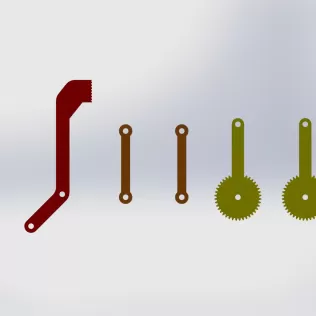
Multipart model: Yes
-
File format: stl
-
File size: 488.27 KB
-
Upload date: 01/29/2026
-
Last update: 01/29/2026
Description
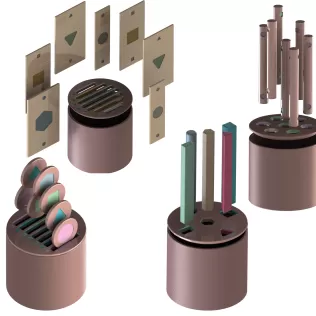
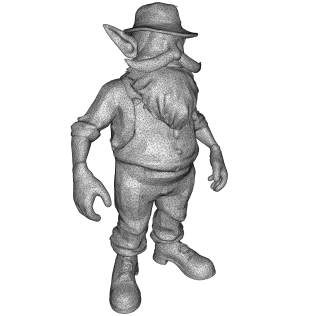
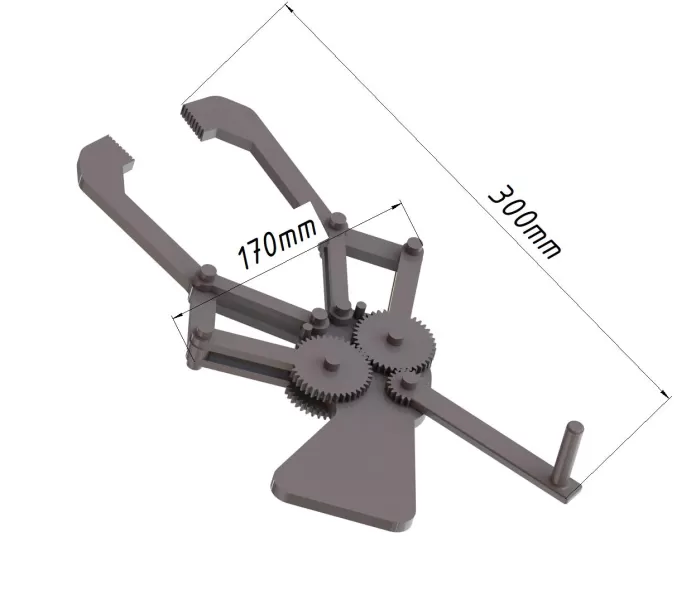
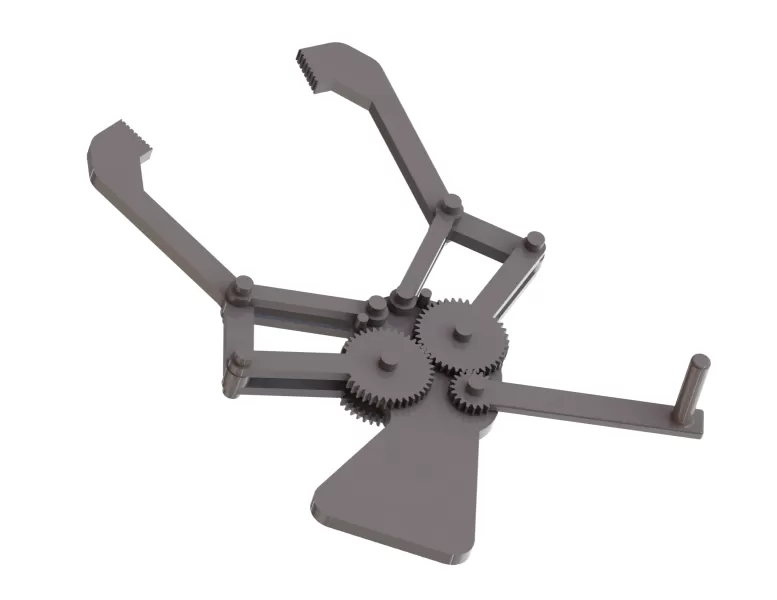
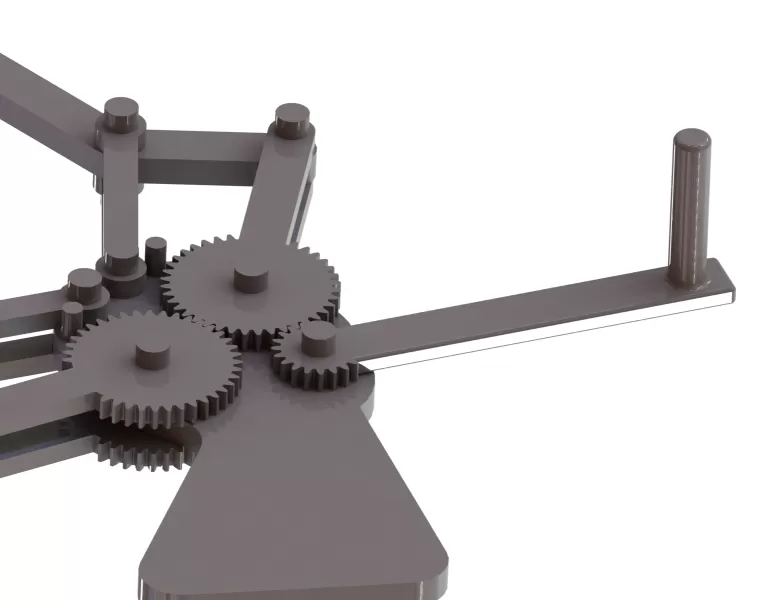
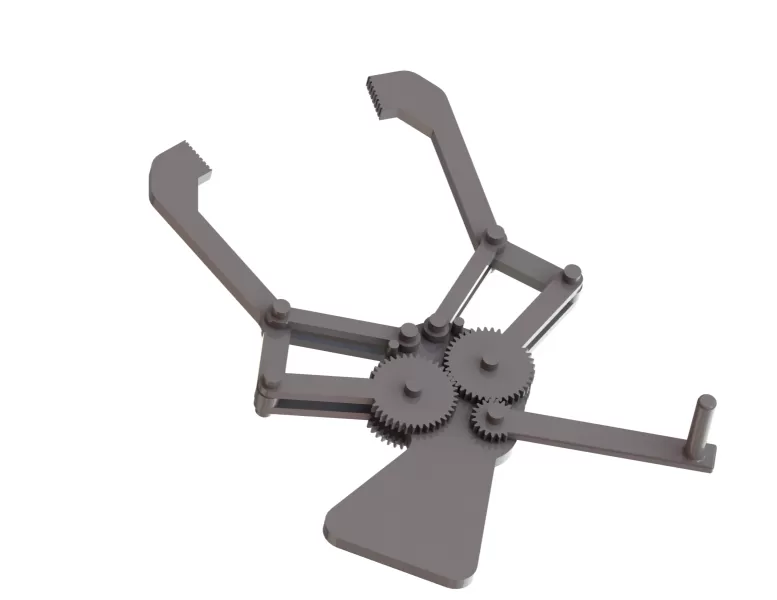
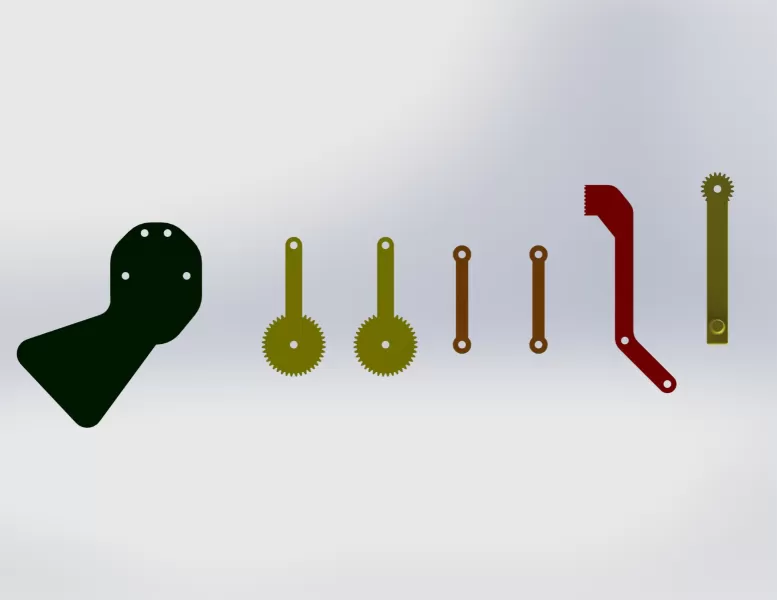
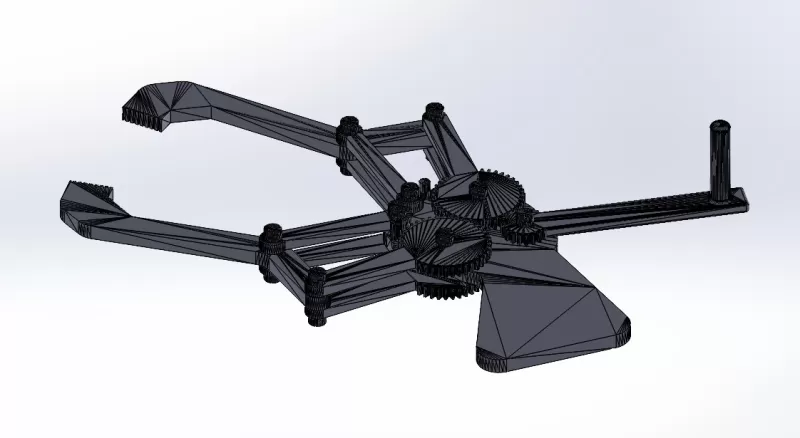
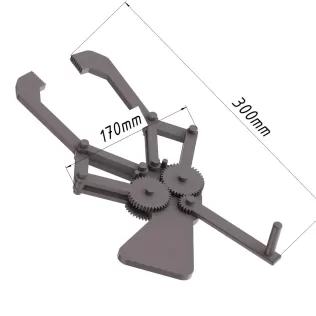
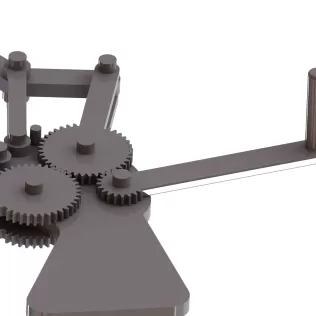
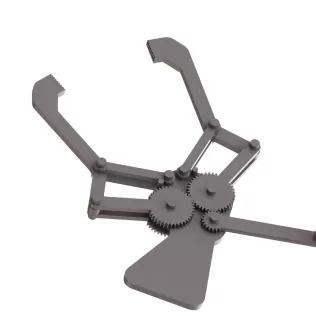
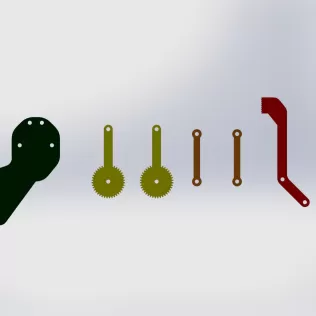
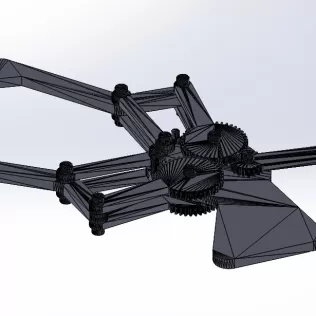
This is a mechanical gripper mechanism designed as a functional and demonstrational 3D model. The design includes a flat base platform on the lower left side, allowing the model to be comfortably held with fingers during operation. A built-in handle integrated directly with the drive gear enables smooth manual actuation and clearly demonstrates how rotational motion is converted into synchronized gripping movement. All joints and pivot points are designed so the assembly can be made using standard M5 bolts, washers, and nuts, making the model practical for real mechanical assembly.
Features
Mechanical gripper with synchronized jaw movement
Gear-driven linkage system for symmetrical operation
Integrated handle combined with the drive gear for direct manual control
Flat base platform for stable finger grip during use
Connections compatible with standard M5 bolts, washers, and nuts
Suitable for real assembly, testing, and educational demonstrations
Ideal for 3D printing, prototyping, and mechanical visualization
Clean, parametric CAD geometry, easy to modify or scale
Features
Mechanical gripper with synchronized jaw movement
Gear-driven linkage system for symmetrical operation
Integrated handle combined with the drive gear for direct manual control
Flat base platform for stable finger grip during use
Connections compatible with standard M5 bolts, washers, and nuts
Suitable for real assembly, testing, and educational demonstrations
Ideal for 3D printing, prototyping, and mechanical visualization
Clean, parametric CAD geometry, easy to modify or scale
Tags
- gear
- 3dprint
- mechanic
- engineering
- gripper
Report this design